2021-10-15 來源: 作者:任杰
商用車駕駛安全現(xiàn)狀
據(jù)世界衛(wèi)生組織統(tǒng)計,交通事故已成為“世界第一殺手”。中國每年交通事故高達50萬起,,因交通事故死亡人數(shù)年均超過10萬人,,已經(jīng)連續(xù)十余年居世界第一,,其中重大交通事故多集中在商用車。以商用車中的貨車為例,它有著非常高的車禍率。根據(jù)公安部交管局的統(tǒng)計,,2016年全國共發(fā)生貨車責任道路交通事故5.04萬起,占汽車責任事故總量的30.5%,,遠高于貨車保有量占汽車總量的比例,。
相關研究表明,事故發(fā)生的原因93%是由于人為原因造成的,,只有7%是道路環(huán)境,、車輛本身故障等其他因素造成的。弗吉尼亞理工學院交通運輸學院公布了一組實際的駕駛員習慣,、分心和碰撞原因的調(diào)查數(shù)據(jù)分析,,將近80%的碰撞是由于駕駛員事發(fā)前3秒的疏忽造成。研究證明:
?通電話時(增加30%的風險)
?撥打電話(增加300%的風險)
?睡意(增加400%的風險,,并占碰撞和輕微碰撞原因的23%)
?用手拿移動的物體(增加900%的風險)
商用車往往因為載重過高,、體積過大、慣性較大等因素造成的事故傷害也較為嚴重,。
因此, 商用車市場對于降低交通事故的發(fā)生概率, 減輕或避免事故的傷害已經(jīng)引發(fā)了全球社會的廣泛關注和技術升級需求,。而隨著自動駕駛技術的顯著發(fā)展浪潮,通過各種車載傳感器收集車內(nèi)外的環(huán)境數(shù)據(jù),進行靜,、動態(tài)物體的辨識,、偵測與追蹤,交通環(huán)境場景的綜合理解等技術上的處理,從而讓駕駛者在最快的時間察覺可能發(fā)生的危險并采取相應的措施,,以提升駕乘安全性,近些年得到了廣泛的關注和應用,。
根據(jù)SAE自動駕駛等級分類的定義, 我們可以將自動駕駛技術劃分為兩大類別:高級輔助駕駛系統(tǒng)(ADAS)以及高階自動駕駛系統(tǒng)(ADS)。高級輔助駕駛(ADAS)主要覆蓋SAE L0~L2級別范圍,,被普遍認為是實現(xiàn)自動駕駛無人駕駛系統(tǒng)的過渡性技術,,通常包括車道保持系統(tǒng)(LKA)、夜視系統(tǒng),、自適應燈光控制,、行人保護系統(tǒng)、交通標志識別(TSR),、駕駛員疲勞探測,、下坡控制系統(tǒng)和電動汽車報警系統(tǒng)、車道偏離警示系統(tǒng)(LDW),、前向碰撞預警系統(tǒng)(FCW),、盲區(qū)監(jiān)測系統(tǒng)(BSD)、變道輔助系統(tǒng)(LCA),、自適應巡航系統(tǒng)(ACC),、自動緊急制動(AEB)、自動泊車系統(tǒng)(APS)等,。而高階自動駕駛則覆蓋SAE L3~L5級別范圍, 重點是替代人類在特定環(huán)境和無限制環(huán)境下的無人駕駛,。
目前,ADAS系統(tǒng)處于在產(chǎn)業(yè)界廣泛應用的階段,。美國公路安全保險協(xié)會(IIHS)公布其最新研究發(fā)現(xiàn):汽車防撞系統(tǒng)會使交通事故的發(fā)生率大幅降低,。裝有預警系統(tǒng)的車輛發(fā)生單車、側擦和正面碰撞等事故的比例降低了11%,,防撞技術讓同類傷亡事故的發(fā)生率降低了21%,。

圖表 1 商用車AEB測試
ADAS系統(tǒng)的廣泛應用與落地,得益于全球以及中國法規(guī)政策的引導。
2016年12月頒布的《中共中央國務院關于推進安全生產(chǎn)領域改革發(fā)展的意見》中明確指出,,生產(chǎn)安全事故責任入刑,,以商用車作為重點監(jiān)管對象的交通安全成為三大重點領域之一,。
2017年4月,《營運客車安全技術條件》正式實施,,明文要求“車長大于9米的客車,,應裝備前撞預警系統(tǒng)(FCWS)及車道偏離預警系統(tǒng)(LDWS)”。
2017年9月29日,,《機動車運行安全技術條件》GB 7258—2017發(fā)布,,此標準自2018年1月1日開始正式實施,標準的全部技術內(nèi)容為強制性,。
2018年6月,,交通運輸部辦公廳發(fā)布關于推廣應用智能視頻監(jiān)控報警技術的通知,要求在既有三類以上班線客車,、旅游包車,、危險貨物道路運輸車輛、農(nóng)村客運車輛,、重型營運貨車上安裝智能視頻監(jiān)控報警裝置,,新進入道路運輸市場的“兩客一危”車輛前裝智能視頻監(jiān)控報警裝置,,實現(xiàn)對駕駛員不安全駕駛行為的自動識別和實時報警,。
2018年4月1日開始強制實施的《營運客車技術條件》,其中對于車長超過9米的新生產(chǎn)營運客車,,需要強制安裝LDWS和FCWS,,2019年將強制實施安裝AEB的要求。
政策措施起到了非常明顯的推動作用,,“進度條”一直緩慢的商用車ADAS推廣開始加速,,國內(nèi)ADAS正式進入強制安裝時代。
商用車高階自動駕駛領域的目標,,則是更多地從TCO(Total Cost of Ownership)來重塑商用車商業(yè)市場運營模式,。從交通事故安全保障、商業(yè)保險與維修成本,、司機人員的成本,、能源形式與能效比等多方面綜合考量新的商業(yè)模式。但是,,上述商業(yè)模式重塑的過程中,最重要的因素始終是安全,,即大幅度減少商用車交通事故的概率。通過單車智能及車路協(xié)同等多種方式來推進,。其次,,是商用車能源利用的合理高效與環(huán)保,車聯(lián)網(wǎng)絡的互連互通與交互,提升車隊隨行人員的工作環(huán)境舒適性與便捷性。最后,,達到整體商業(yè)模式的生態(tài)重塑,。
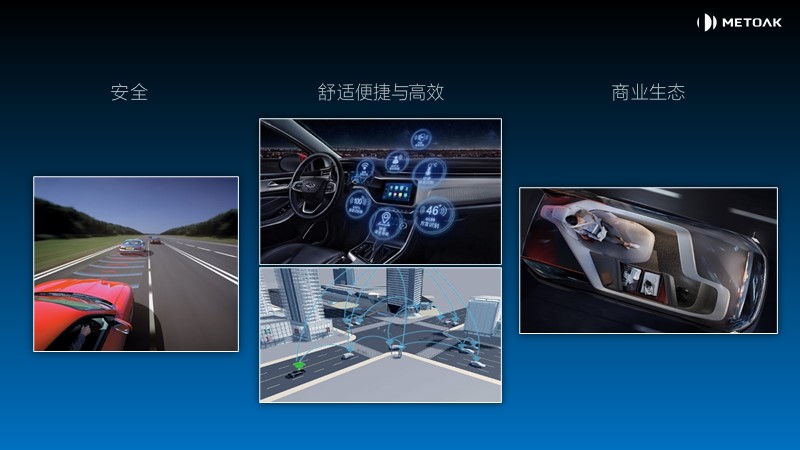
圖表 2 商用車自動駕駛模式生態(tài)的演進邏輯
在自動駕駛的發(fā)展過程與逐步落地過程中,自動駕駛技術不同的等級所關注的側重點亦有所不同,。從輔助人類駕駛向替代人類駕駛以及超越人類駕駛能力的商業(yè)演變過程中,我們逐漸從關注少誤報(舒適性考慮)+少數(shù)種類目標和場景(技術成熟度和成本考慮)的輔助作用向少漏報(安全性考慮)+全類型目標和場景的預防避免和無人化作用演進。如圖表 5所示,。
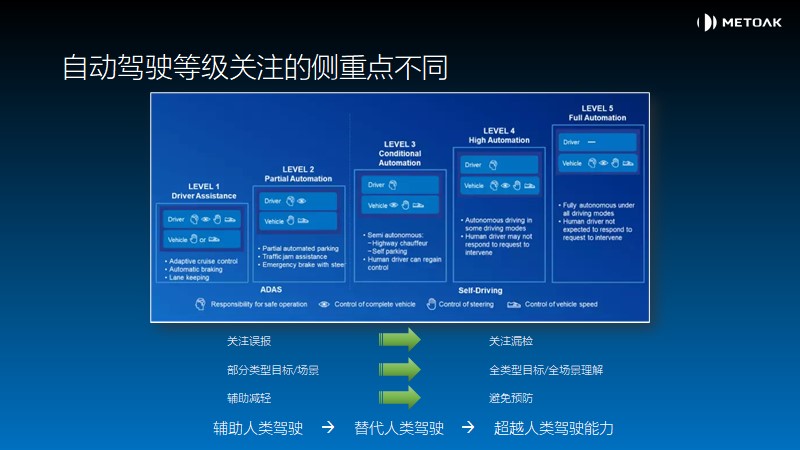
圖表 3 自動駕駛等級關注側重點演變
但我們也深知,自動駕駛尤其是無人駕駛系統(tǒng)所面臨的現(xiàn)實交通場景是極其復雜多變的,。 盡管整個交通道路規(guī)則設施的設立全是以人類的基本統(tǒng)一全球化認識為基礎來設立,但是,不同的城市/郊區(qū)/鄉(xiāng)村和高速道路環(huán)境有不同種類的交通參與者甚至動物,尤其是人作為高等智能生物體所具有的復雜多變的意圖都對這一技術領域帶來巨大挑戰(zhàn),。我們稱之為自動駕駛場景的“長尾效應”。推進技術的進步,帶來全新安全高效環(huán)??萍嫉慕煌ㄏ到y(tǒng),對自動駕駛技術尤其是視覺感知系統(tǒng)提出了深刻而又巨大的挑戰(zhàn)與機遇,。
商用車自動駕駛對視覺感知系統(tǒng)的要求
商用車自動駕駛,由于面向商用運營領域,所處的運營環(huán)境具有較大的差異,因此不同環(huán)境下的自動駕駛技術也具有不同的特點。
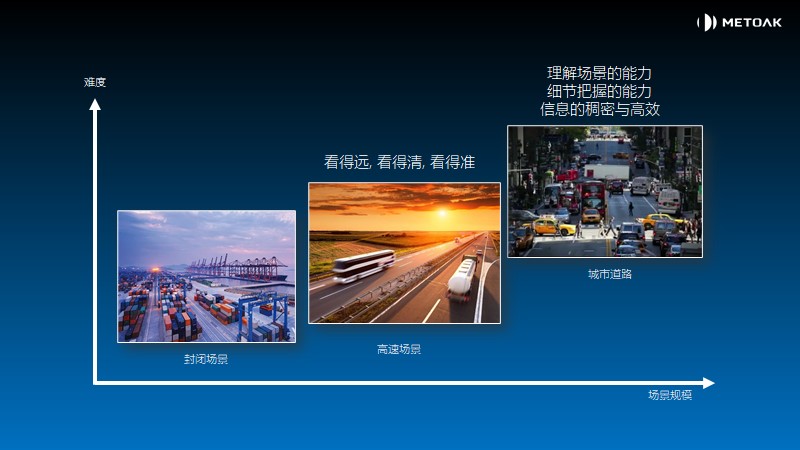
圖表 4 自動駕駛場景/技術難度分類
根據(jù)場景規(guī)模與技術難度,大致可以劃分為三大類場景:低速封閉場景,、高速城市干道場景,、城區(qū)場景。低速封閉場景主要關注自動駕駛的準確性,、運營調(diào)度的高效性,目前無人化的落地趨勢最為明顯,。高速城市干道環(huán)境主要關注識別距離遠、看得準確清晰和承受多種天氣地理條件的影響,。目前,,全球如圖森未來、Waymo,、小馬智卡,、嬴徹科技等均以推出量產(chǎn)卡車L4解決方案來推進落地。而城區(qū)中低速場景則主要解決復雜參與者意圖,、道路標記不清,、交通規(guī)則復雜等問題。比如,,商用車視野盲區(qū)問題,城郊道路的限高/限寬可通過性,路沿邊界檢測以及精準自動泊車等問題,。
在不同的交通場景中,對自動駕駛感知系統(tǒng)提出了嚴苛的需求標準。例如:
應對多傳感器融合失效的問題,。為了引入更好的全工況能力和安全冗余,多傳感器需要在單一傳感器失效的情況下仍能繼續(xù)運行或降低等級保障最低安全程度運行,。例如1V1R或1SV1R(SV是Stereo Vision),1SV1R可以在單一攝像頭失效,毫米波雷達失效的情況下仍能繼續(xù)安全工作。
需要看得遠看得清的超視覺感知需求,。例如能看得清1km的大基線高分辨率雙目立體相機,。
單一傳感器能夠提供更加豐富的環(huán)境感知數(shù)據(jù)。雙目立體視覺相機因為可以同時獲取豐富的圖像以及3D信息而具有較大的優(yōu)勢,。
本文接下來將重點介紹雙目立體視覺感知傳感器技術,。
雙目立體視覺感知系統(tǒng)
在生物智能視覺中,一個有意思的現(xiàn)象是大多數(shù)遺傳進化的生物體都具備雙目立體視覺的能力。英語里面有一句諺語: Eyes on the side, animals hide. Eyes on the front, animals hunt,。
處于生物鏈頂端的生物,更多是捕獵者,需要更加精準的定位與測距能力,因此進化成了前視的雙目形成較為精準的立體視覺,。而處于生物鏈中低層的被捕獵者,則需要看到更多的全景視野來規(guī)避威脅,。
自動駕駛系統(tǒng)中的雙目立體視覺感知理論與技術便是從大自然的生物進化智慧中借鑒而來。
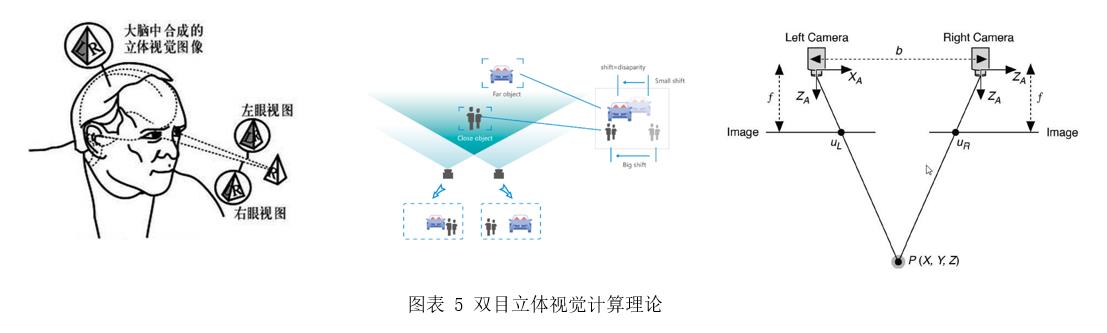
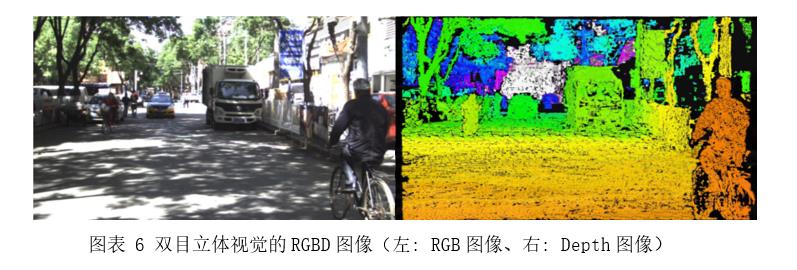
通過兩只眼睛的成像視差,可以精準地計算出物體實際的空間位置,從而實現(xiàn)對三維世界的三維感知能力,。雙目立體視覺可以得到精準像素點對齊的顏色圖像和深度信息圖像,我們稱之為RGB-D圖像,。如下圖所示。
與其他自動駕駛的傳感器如激光雷達Lidar,、毫米波雷達Radar等相比,雙目立體視覺具有明顯的特征和優(yōu)勢,。例如下圖所示,與激光雷達相比,雙目立體視覺具有明顯量級優(yōu)勢的視覺感知信息密度優(yōu)勢。激光雷達為128線掃描,而雙目立體視覺則可以很容易地生成等效720線/1080線甚至2000+線束的深度圖像,同時具有較小的角分辨率能力,。更多的比較雙目立體視覺所具有的特色可以參見表1,。

通過以上對比,我們可以發(fā)現(xiàn),雙目立體視覺傳感器技術可以適應更多場景,以及更多自動駕駛等級的需求,具備從ADAS到ADS全場景全階段的適配和支持能力,。
尤其是, 雙目立體3D綜合感知視覺具有諸多2D圖像視覺所不能完成的功能特性,例如地形檢測,、地面凸起/凹陷檢測、算力高效的可行駛區(qū)域檢測,限高限寬檢測等,。
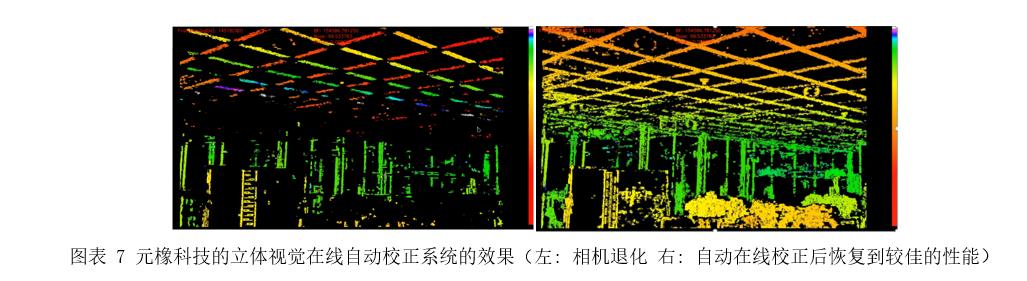
立體視覺在落地的過程中,會受到運行環(huán)境對產(chǎn)品可靠性,、穩(wěn)定性的考量。因此,除了在硬件結構和材料學,、熱力學方面進行科學理論分析和實踐以外,通過軟件手段來對實際運行環(huán)境中高低溫,、震動等帶來的影響進行降低和消除。以下展示了元橡科技(METOAK)的相機在線自校正算法技術達到的效果,以及通過自動標定實現(xiàn)對場景路面的感知理解,。
商用車360°全景駕駛安全立體視覺解決方案
基于雙目立體視覺的技術特點和優(yōu)勢,我們提出了商用車360°全景駕駛安全視覺感知系統(tǒng),以立體視覺為核心,打造一個超安全的商用車自動駕駛系統(tǒng),稱之為瞰行感知系統(tǒng),。其包含商用車駕駛艙內(nèi)/艙位兩大域功能,艙內(nèi)感知以DMS/OMS為主體,實現(xiàn)駕駛員疲勞檢測報警,打電話/吃東西/左顧右盼等危險動作警示,。駕駛艙外以ADAS雙目立體前視相機,、側向BSD雙目相機、頂視雙目立體視覺和后視雙目相機為環(huán)繞式360°布局,。如下圖所示:

圖表 8 元橡科技以立體視覺為核心的360°全景瞰行感知系統(tǒng)
結語和未來展望
隨著自動駕駛場景的不斷成熟和細化,傳感器器件的發(fā)展和降本,工藝可靠性的逐步提升, 自動駕駛技術將迎來較大的發(fā)展和演進,。關于視覺感知傳感器未來的發(fā)展趨勢,總體來講,我們判斷將以更高的分辨率、更豐富的感知信息密度和波段,、更遠的探測距離和更精準微小的探測能力為主要方向,,同時,更多的傳感器布局在整個商用車360°環(huán)繞車身,對周圍環(huán)境做到更加真實的三維感知,。